概述
无人机SAR应用需求越来越多,本文将介绍无人机SAR成像时电路非理想参数对成像造成的影响。
雷达仿真
参数设置
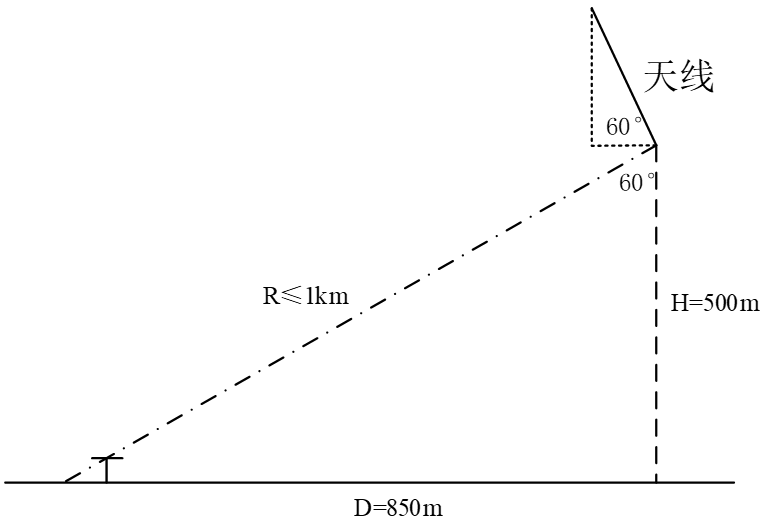
物理参数设置:假设雷达高度500m,天线斜射角度60°,横边近似为850m,最远成像距离1km。以目标作为原点(0,0,0),如图所示此时该状态无人机SAR空间位置为(850,0,500),飞行速度假设匀速20m/s飞行,对1min轨迹上的物体进行成像,可知沿Y轴距离为1.2km。为了更好的演示,我们将无人机初始坐标改设为(850,-600,500),以便对称。
信号参数设置:数字处理和模数转换模块采用安谱力的APF2T2R,其核心FPGA芯片采用Xilinx ZYNQ UltraScale+ RFSoC ZU47DR型号,DAC采样率10GSPS,ADC采样率5GSPS。信号采用线性调频连续波(FMCW)信号,设置带宽1GHz;采样率1.25Gsps;载波频率10GHz;发射接收均使用数字化调制,点数4096,即信号脉宽3.28us;脉冲重复频率PRF设置为1000(即周期为1ms);采样时间1s,即周期数1000。
参数计算
知道了坐标和信号参数之后便可以计算无人机运动轨迹,注意这里无人机运动轨迹包含快时间和慢时间,快时间是指1个周期内雷达在每个采样点(0.8ns)的移动,慢时间是指在每个采样周期初始状态(1ms)。毕竟在仿真中我们信号的占空比仅0.3%(实际使用时一般能达到10%),如果按照0.8ns时间计算1s内的距离,计算量太大了,也不符合实际。况且在实际系统中慢时间可由GPS+惯导直接读取。
这里为了更直观的对称仿真,还是将无人机初始状态设置(850,0,500),同时引入负时间,即快时间为(-1.64us,1.64us),慢时间为(-0.5s,0.5s),不影响最终结果。可以计算得到无人机在每个位置的坐标。
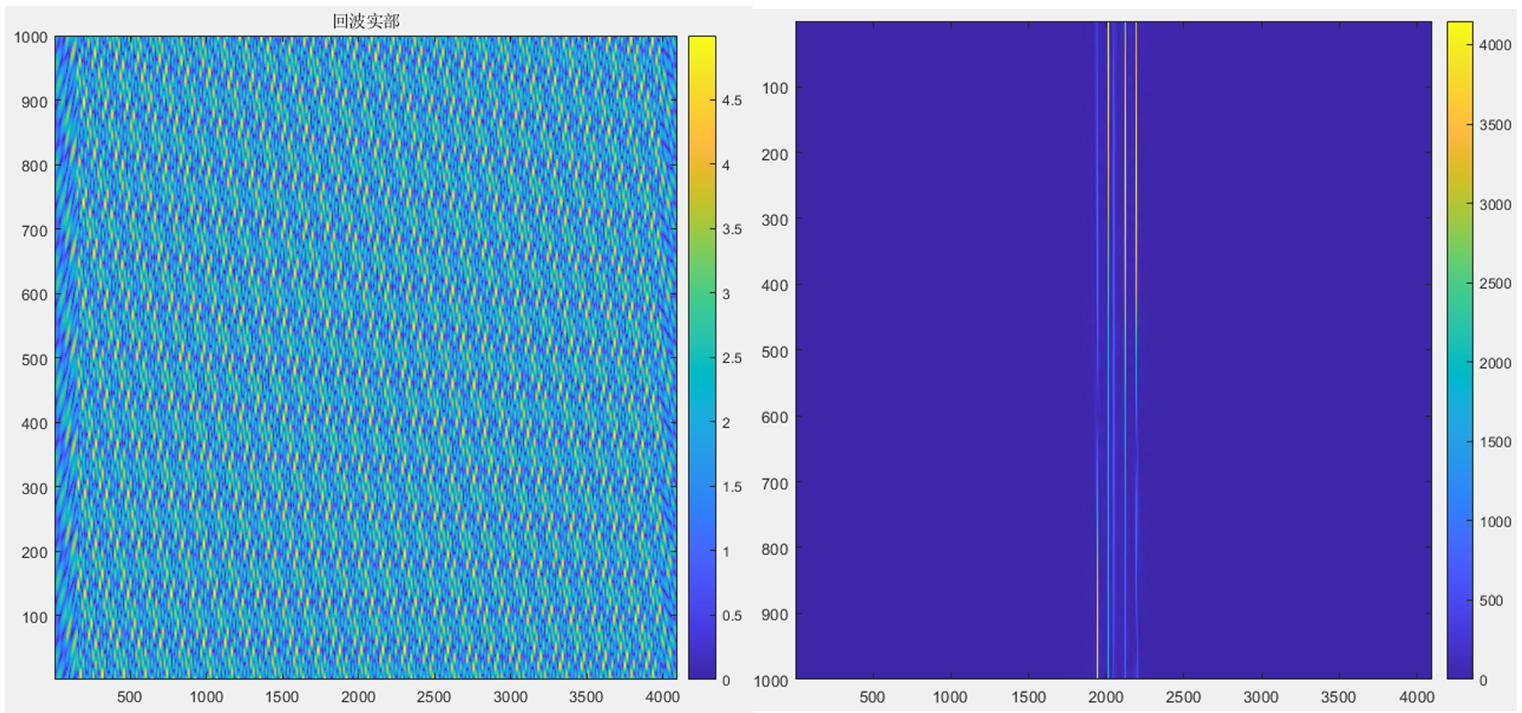
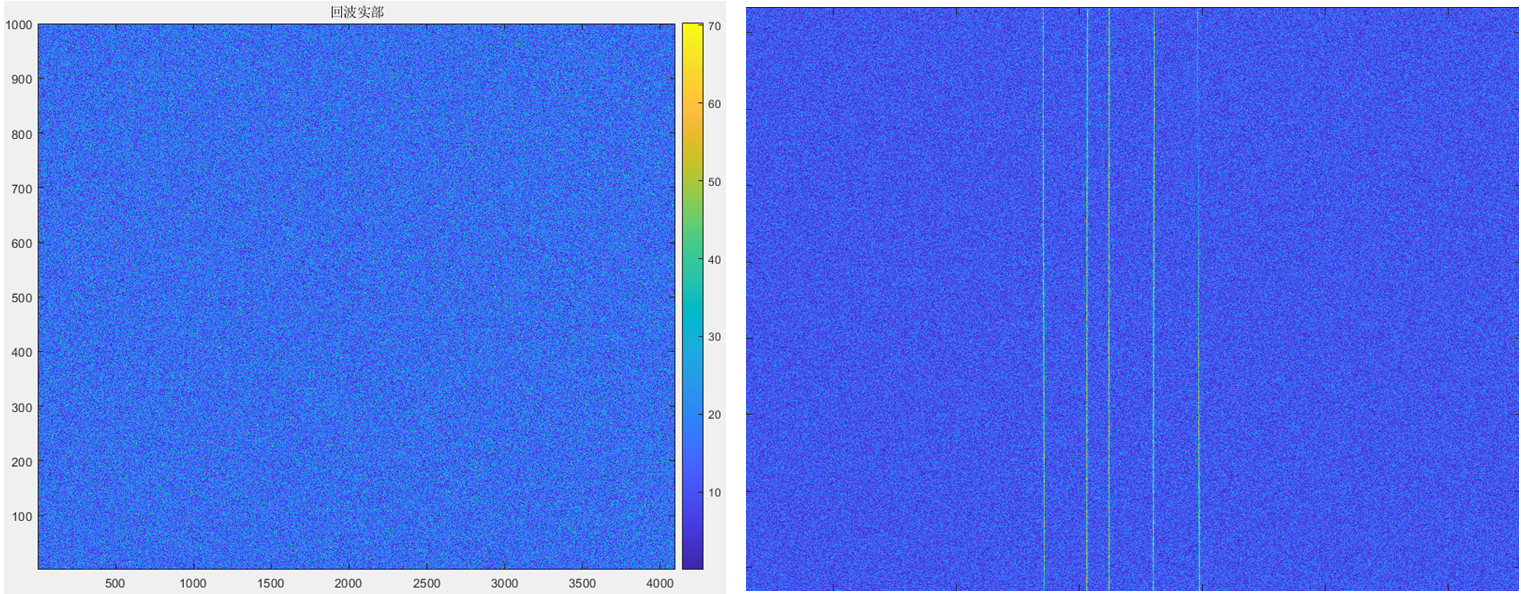
接下来我们放置5个假想目标,分别为(0,0,0),(5,5,0),(-10,10,0),(15,-15,0),(-20,-20,0)。根据FMCW的波形公式,可以得到距离时间-方位时间域的回波数据,下面是回波的实部数据;将回波和原信号做混频,再对其做FFT,得到二维数组,可以看到右图中有五条很明显的连续频谱变化,即可线性的转化为距离变化曲线。通过距离曲线便能定位每个点的坐标。
雷达成像
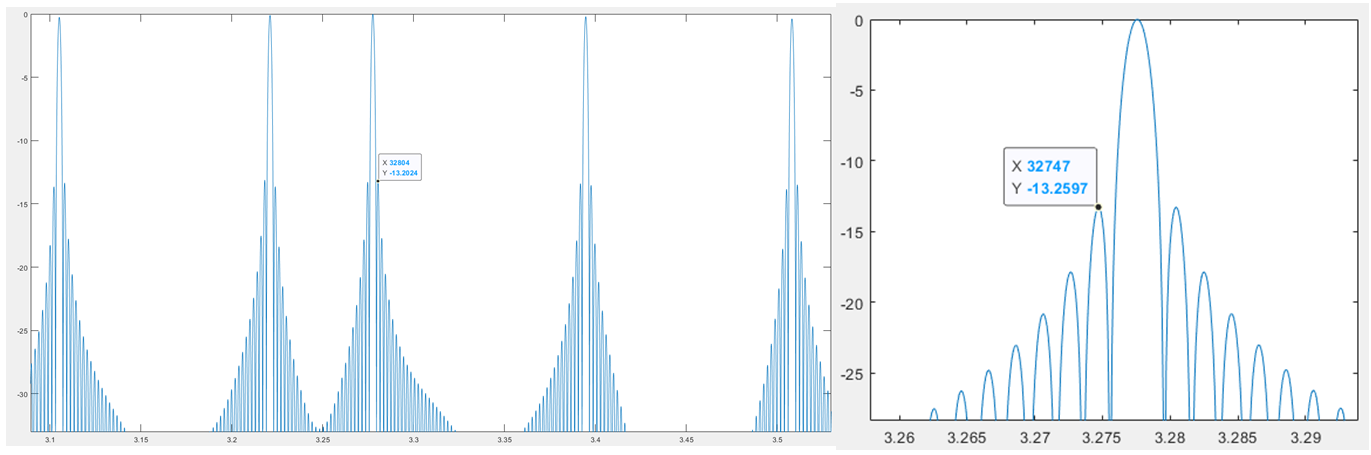
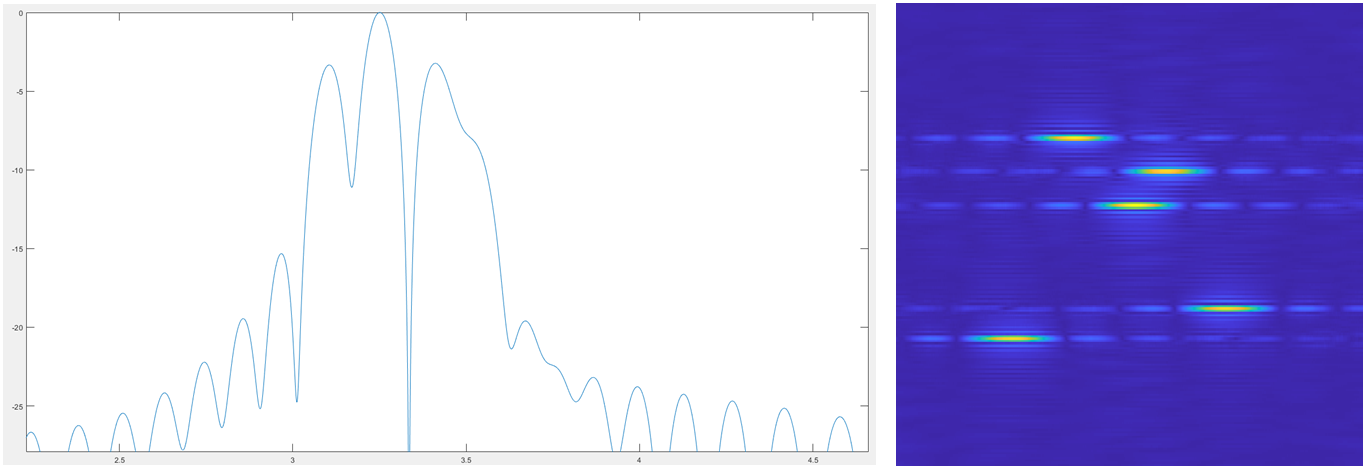
对其中一个周期的数据抓取出来做FFT,可以更加直观的看到有五个目标,同时我们观测到每个目标都是一个sinc函数,旁瓣最好的值为-13.2dB;为了对比我们重新仿真了单目标时的sinc函数,旁瓣-13.26且对称,这是因为多目标时成型的波形会相互影响。而这也是我们判断成像质量的依据,旁瓣对称且低意味着主瓣高且准。
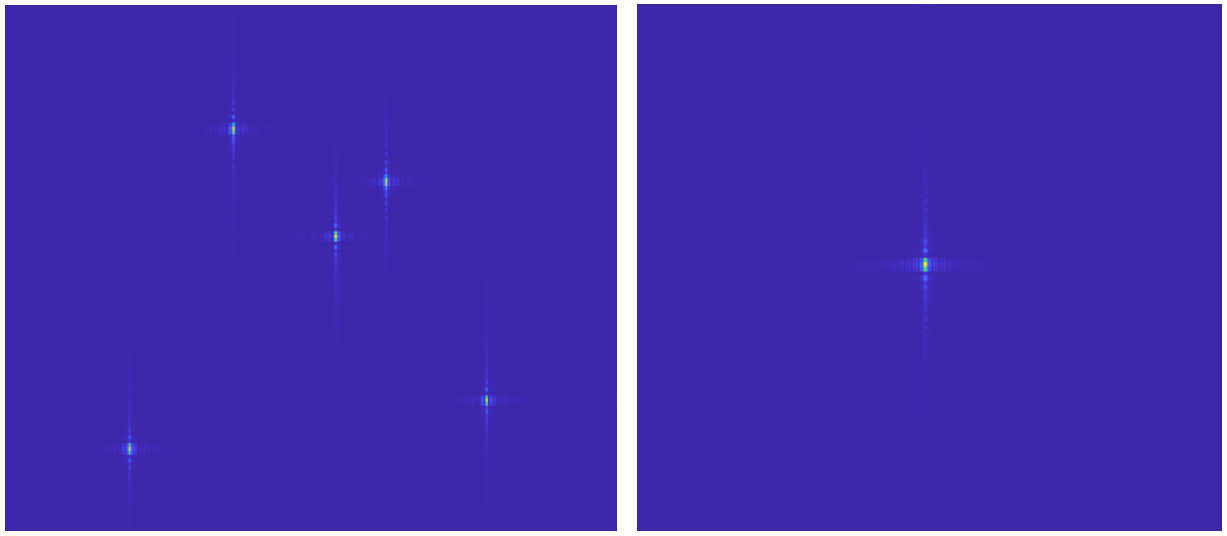
对上述两种情况分别成像,效果如下,后期图像优化时可将副瓣消除:
而且我们目前信号带宽使用1GHz,对应分辨率为0.15m,我们将信号带宽改为20MHz,分辨率为7.5m试试,此时波峰仅有三个,原因是两个目标之间仅间隔7.07m,使得雷达认为其为一个目标,故FMCW雷达的带宽是直接和分辨率挂钩的。但通过长时间位移累积也能分辨出5个单位如右所示,但位置精确度受了很大的影响。
不理想特性
回顾一下硬件电路有哪些不理想特性:主要分为两类:幅相失真和噪声。幅相失真主要来源于电路中的非线性器件,LNA、滤波器、混频器等等。两类不理想特性都能通过选用更好的器件、使用更好的系统方案来改善。我们分别对两种不理想特性进行分析。
噪声
这里就默认电噪声为高斯白噪声,其主要的贡献就是让微弱信号淹没在噪声中,这也更加贴近于日常远距离成像实验,根据雷达方程可知,信号功率是随距离的四次方衰减的,当反射回接收天线时功率已经相当微弱。下图左边是添加了噪声的回波实部,右边是去斜之后的结果。
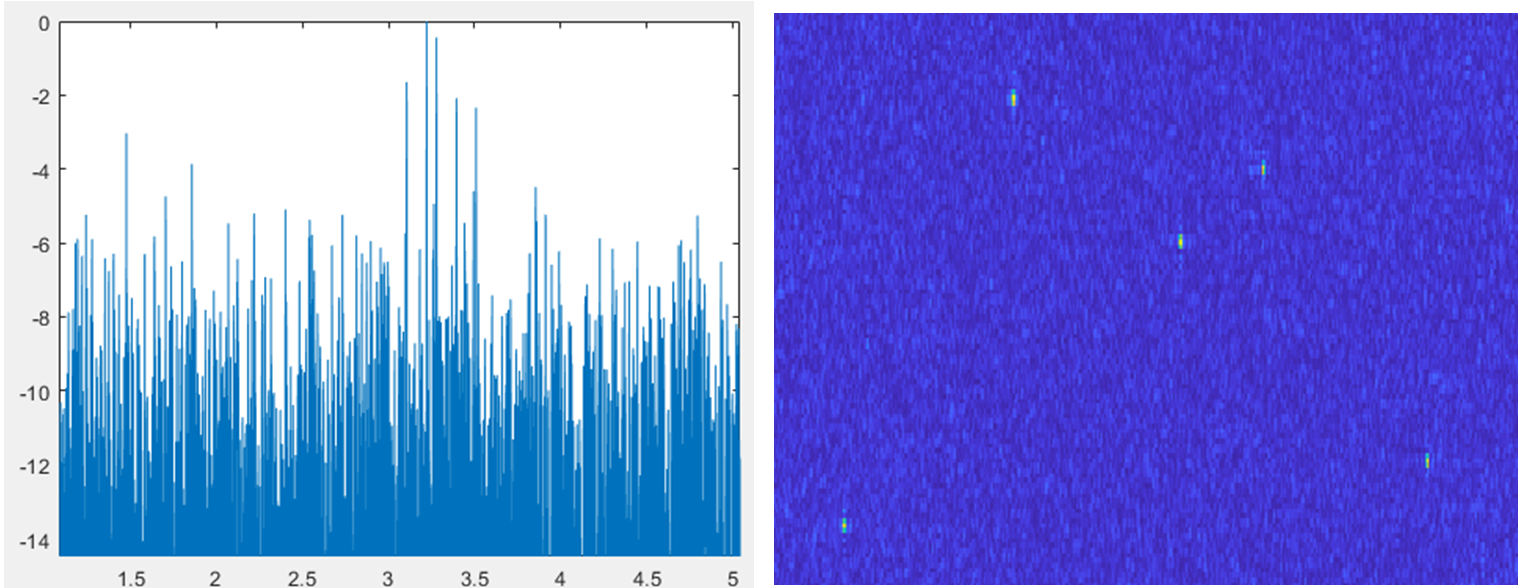
同样可以得到FFT结果,此时信噪比已经差不多仅剩3-5dB。然后成像,发现背景有很多噪底,后续还可以进行优化,真有种大海捞针的感觉,一帧不卡,二帧流畅,三帧电竞。
幅相不平坦
增益波动
为了明显的看到增益波动对成像的影响,我们将带内增益波动设置为5dB,如图所示
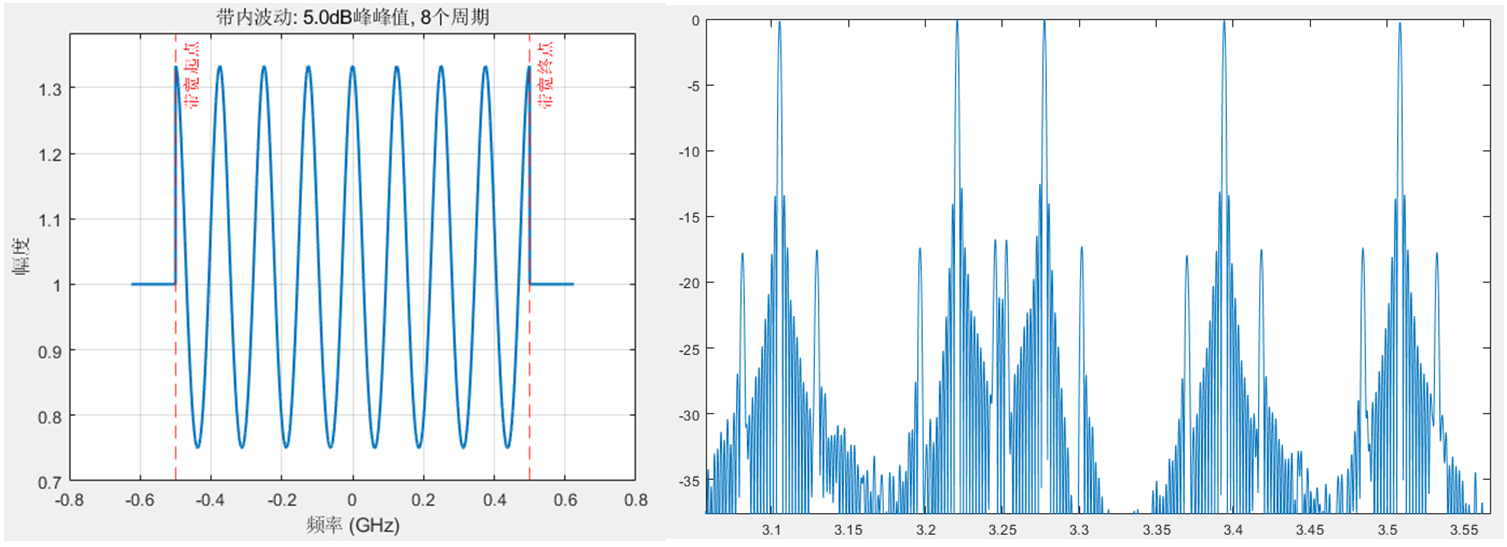
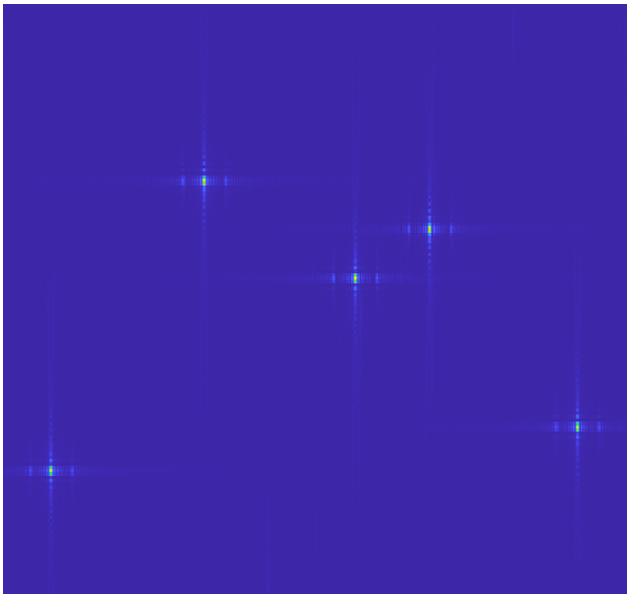
可以看到去斜后的信号由于幅度的波动使得旁瓣变高,这可能会使得雷达误认为其是一个较为微弱的目标进行成像,即虚假目标,下面是成像结果,可以看到每个目标的两侧都存在一个虚假目标。
幅频失真
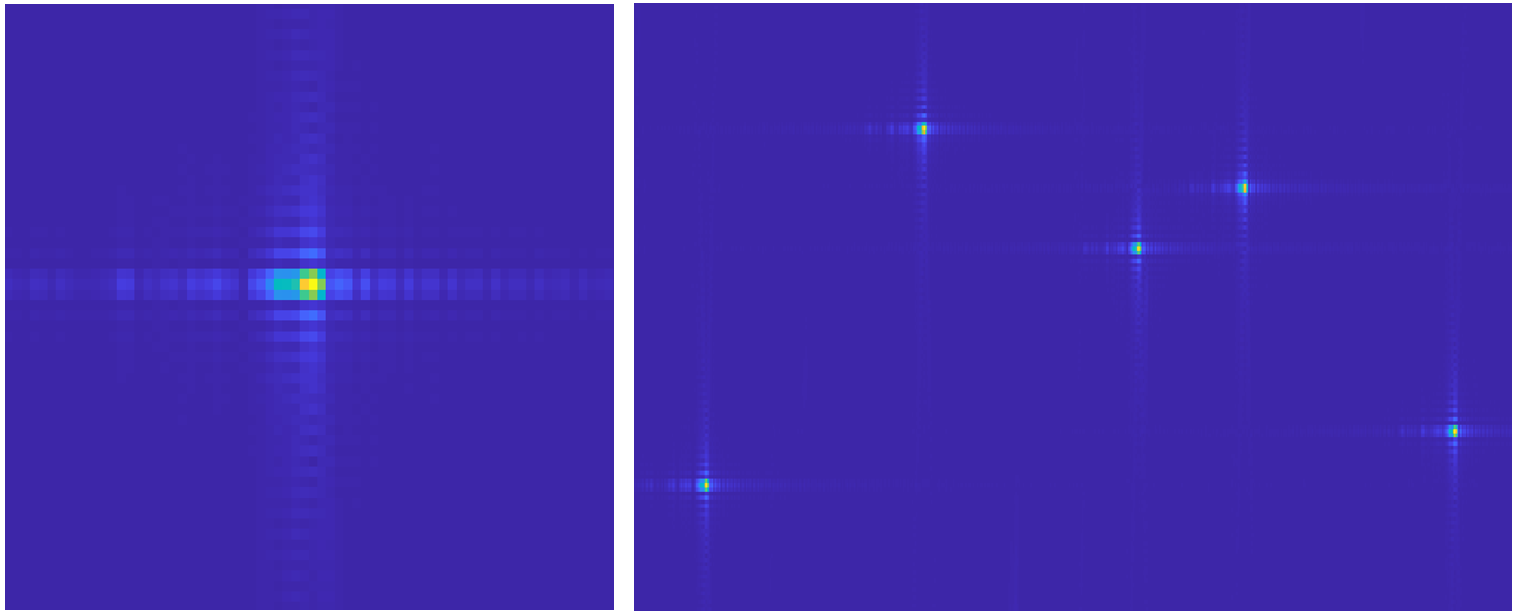
接下来我们采集了一个实际收发机系统的幅频失真响应添加到仿真中,这时的脉压频率会产生一个粘连的副瓣如右图所示:
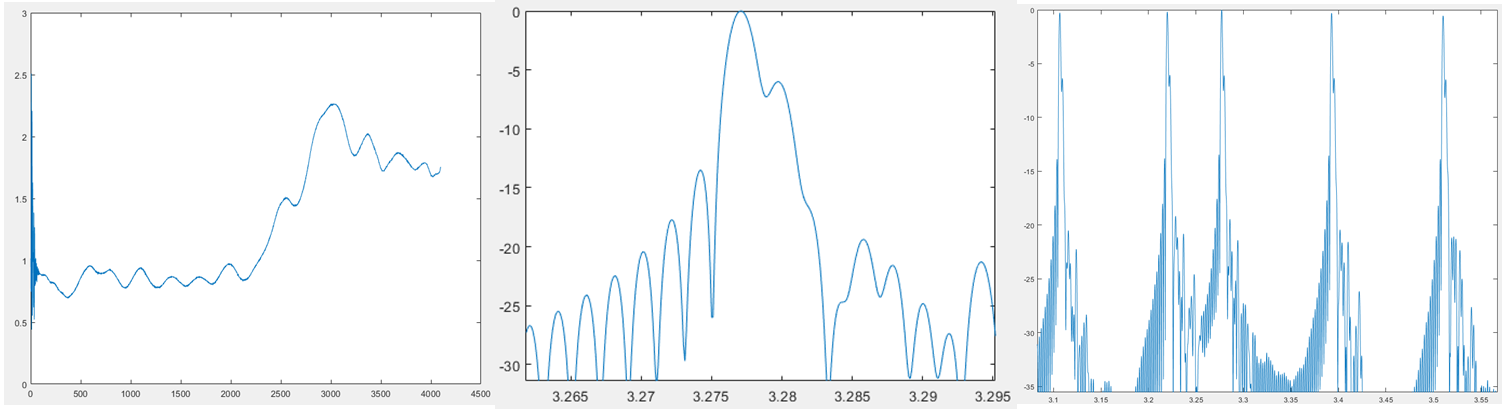
该副瓣会使得原本物体成出一个重影像,使得成像质量下降。
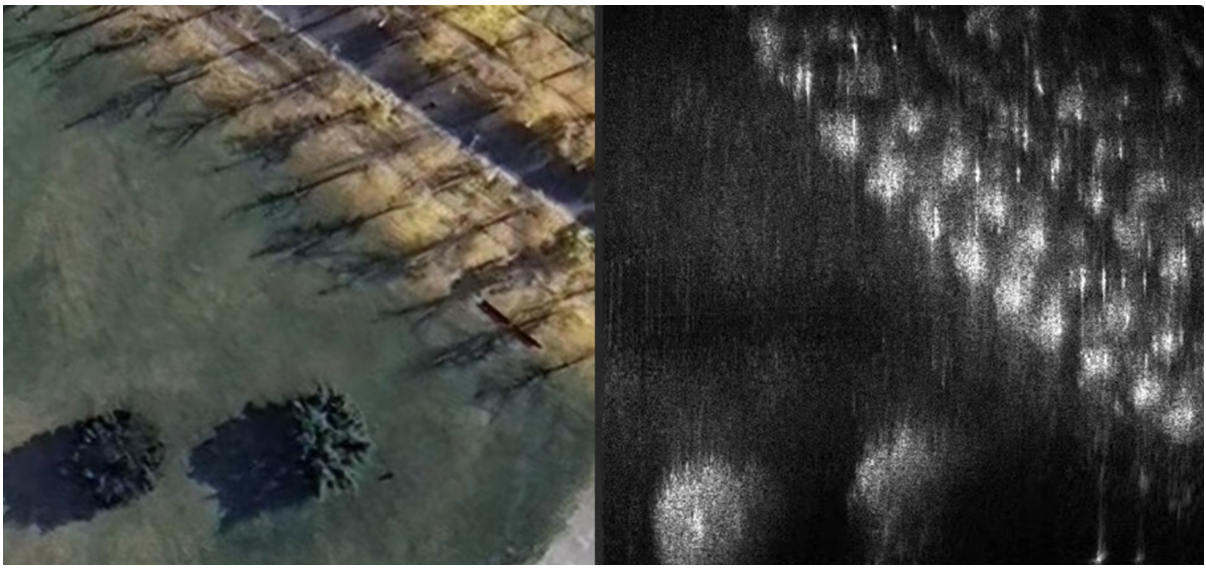
实际成像对比
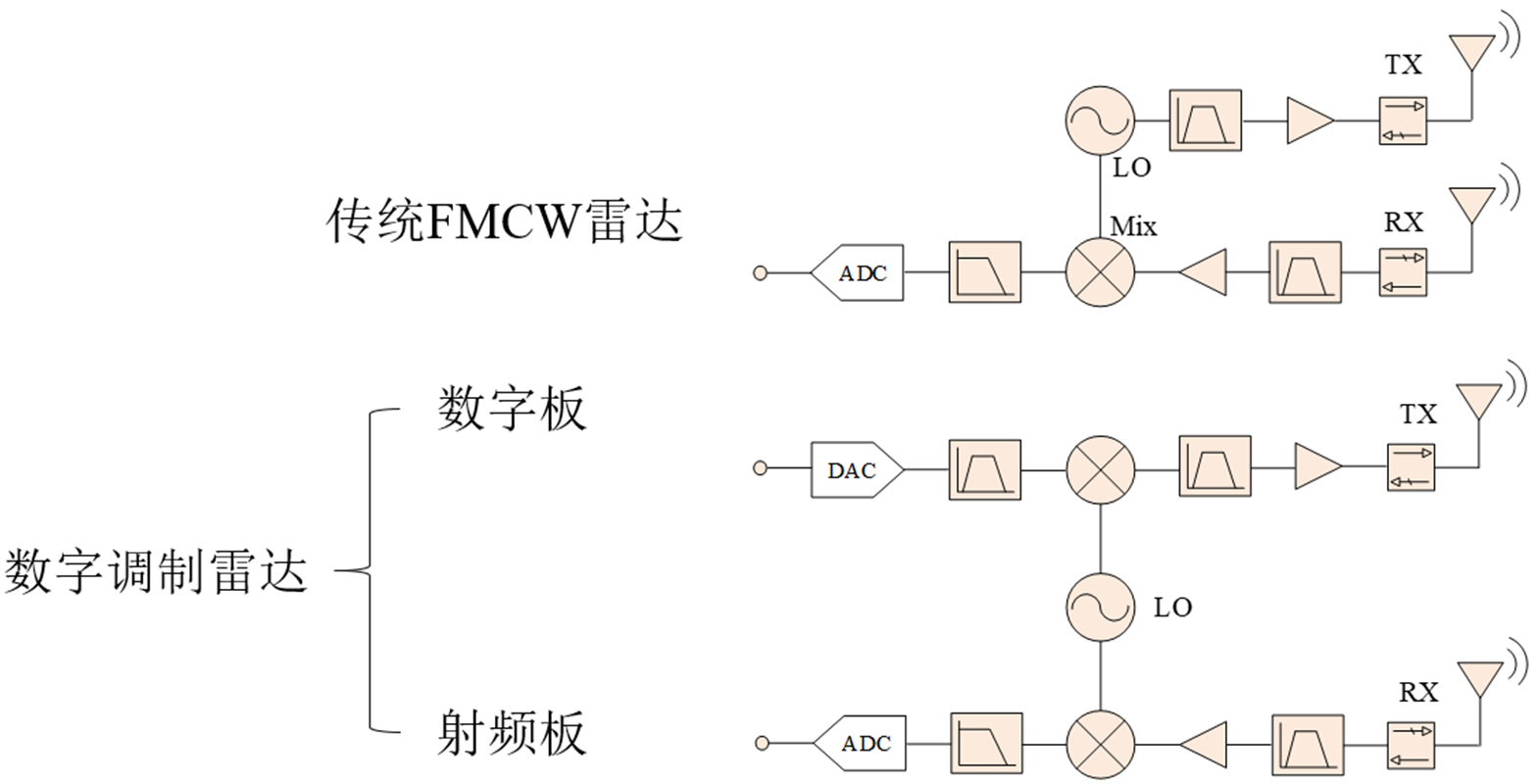
硬件架构
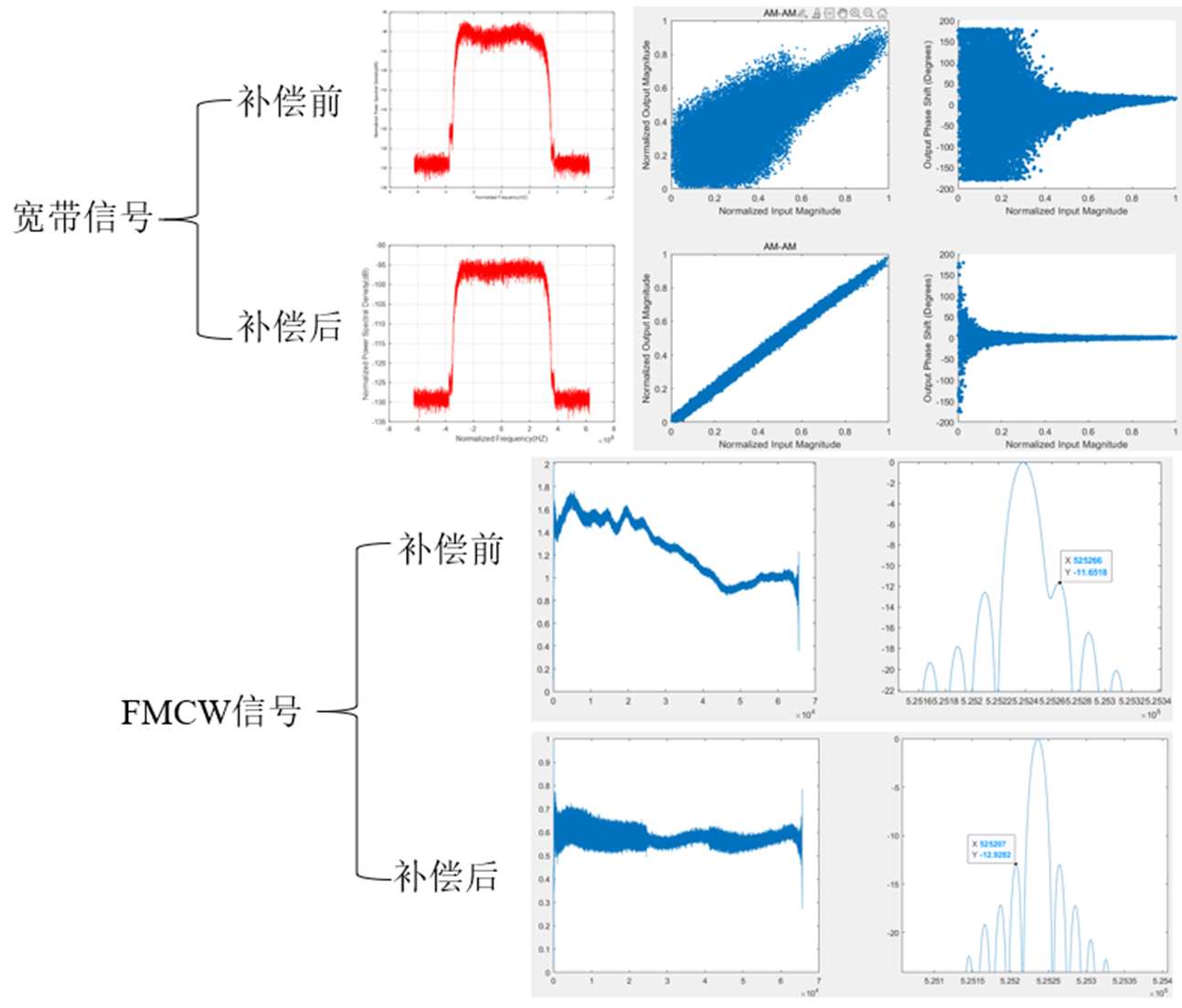
雷达补偿前
雷达补偿后